
La Coupe de France de Robotique
Participation à la compétition en 2018 dans le cadre du projet de 4ème année.
La problématique
Mon objectif dans ce projet était de réaliser la table de jeu mais surtout de développer la mécanique actionneur, je devais donc répondre à plusieurs contraintes de taille, de possibilité et de modularité. Pour énumérer toutes les actions que les actionneurs conçus devaient effectuer, nous avions : - La récupération de cube et la possibilité de les empiler et les déplacer - L'envoi de balle en mousse une par une à des distances souhaitées (environ 3 mètres au maximum) - Le déclenchement d'un interrupteur (appuyer sur le bas pour fermer un circuit) - Support de capteurs et autres J'avais également une partie de tests électroniques, ainsi qu'un asservissement à mettre en place.
L'approche
Pour ce développement, j'avais à disposition le logiciel Solidworks 2017, ainsi que Cura et une imprimante 3D Ultimaker 3 extended. N'ayant que des connaissances communes en mécanique, notre référent de projet, M. Milharo, étant agrégé de Génie Mécanique, Ingiénerie mécanique, me fut d'une grande aide. N'hésitant pas à le questionner sur les aspects techniques, j'ai pu approcher des aspects mécaniques qui me semblaient très difficiles aux premiers abords. Il faut également dire que l'accessibilité à l'imprimante 3D m'a permit de tester beaucoup de maquettes afin de mieux comprendre les contraintes de l'impression 3D. Un développement de l'électronique de test pour le lanceur de balle pour qu'il soit validé par un camarade pour l'implémenter dans le montage final du robot.
La réalisation
Empiler des cubes
 Je n'avais que peu de place pour développer le système de récupération des cubes, cela ne pouvait se trouver que de parte et d'autre de la rampe du lanceur de balle. Il m'a fallu 8 versions afin d'aboutir à celle-ci :
Je n'avais que peu de place pour développer le système de récupération des cubes, cela ne pouvait se trouver que de parte et d'autre de la rampe du lanceur de balle. Il m'a fallu 8 versions afin d'aboutir à celle-ci :
 Ces pinces ont chacune 2 dynamic cell, des AX-12 plus précisemment, un servant à fermer les pinces et le second à faire monter la pince sur une crémaillère en hauteur. Voici ce que cela donne une fois les fichiers actions créés et les pinces ajouteé au robot.
Ces pinces ont chacune 2 dynamic cell, des AX-12 plus précisemment, un servant à fermer les pinces et le second à faire monter la pince sur une crémaillère en hauteur. Voici ce que cela donne une fois les fichiers actions créés et les pinces ajouteé au robot.
Et une fois implémentée dans le code à partir d'un fichier action, prévue pour établir des stratégie rapidement, nous obtenons ceci :

Le lanceur de balle
Pour cette partie, je devais pouvoir envoyer des balles à différentes distances de façon précise et répétable. Je me suis tourné vers un lancer de balle par compression avec une roue. Le système se décompose en plusieurs parties :
-Un moteur à courant continu
-Deux engrenages de rapport 1:1 pour déporter le moteur
-Un pneu de RC trouvé dans le local
-Deux roulements à bille
-Deux pièces de fixation sur le profilé pour le moteur et la roue
-Une "fusée" qui est une tige d'acier pour le guidage de la roue
-De multiple pièces 3D pour que le système soit viable
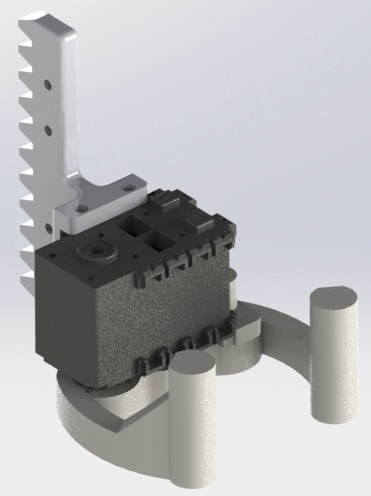
Le système monté ressemble à ceci :
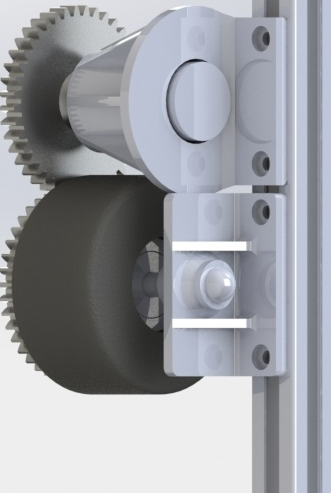
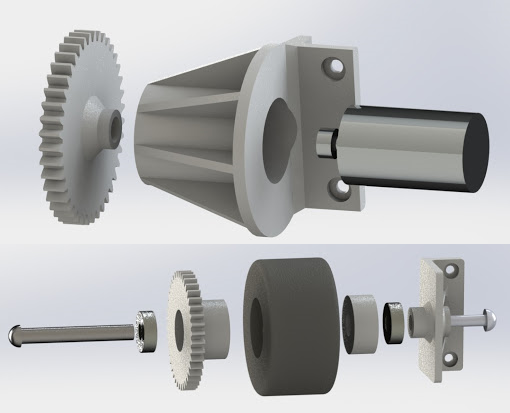
Et voici, les sytèmes en vue éclatée :
 Une fois montée sur un profilé en aluminium du robot, les deux parties étaient réglable en hauteur, ainsi je pouvais choisir le taux de compression des balles aisément.
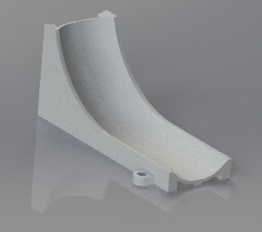
Juste en dessous du lanceur, nous avons développé, avec Hugo Sergent, une rampe nous permettant la trajectoire la plus optimale pour pouvoir effectuer un lancer le plus adapté à nos besoins. La rampe se présente sous cette forme:
Une fois montée sur un profilé en aluminium du robot, les deux parties étaient réglable en hauteur, ainsi je pouvais choisir le taux de compression des balles aisément.
Juste en dessous du lanceur, nous avons développé, avec Hugo Sergent, une rampe nous permettant la trajectoire la plus optimale pour pouvoir effectuer un lancer le plus adapté à nos besoins. La rampe se présente sous cette forme:
Nous avions également un système de sas pour envoyer les balles une par une, afin de palier au problème de la perte de vitesse de la roue au passage d'une balle. Et de trier les balles selon la zone où nous voulions les envoyer. Ce sysème est fixé également sur un profilé et est basé sur deux MG90S, de petits servo moteurs munis chacuns d'une baguette d'époxy.
Le système monté et en fonctionnement donne ça (un cache a été ajouté par protection pour nos doigts):
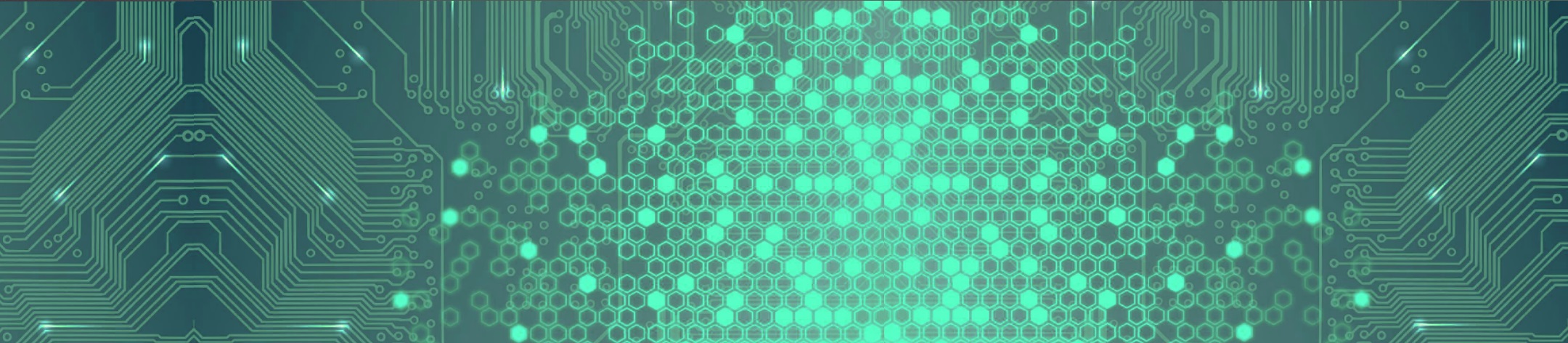
L'actionneur interrupteur
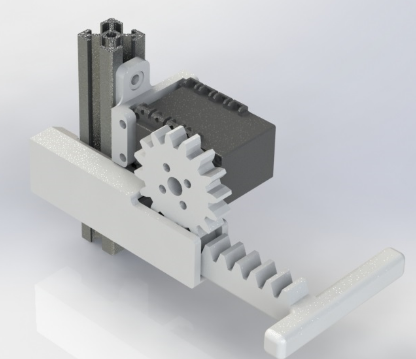
Nous devions être en capacité d'avoir un robot capable d'actionner un interrupteur, étant dans le rush j'ai développé un système, à mon avis surdimensionné mais très efficace, utilisant un AX-12, j'ai modélisé une glissière et une crémaillère.
Toutes les pièces sont faites pour se fixer (encore) sur un profilé et donc être réglable en hauteur facilement, facilitant l'ajustement pour le robot en hauteur.

Supports capteurs et autres
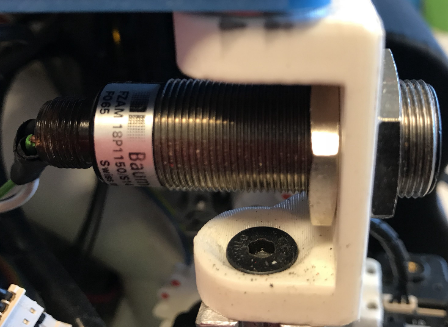
Pour les capteurs, nous en avions deux sortes, des SR-08, capteur ultrason et de capteur infrarouge, pouvant être fixé sur un profilé. Les capteurs IR du petits robots étant plus en hauteur sont inclinés vers le bas pour augmenter nos chances de détection.
Différents modèles existent, chacuns adaptés aux contraintes de place.

Les problèmes rencontrés
Les contraintes mécaniques et donc tous les efforts, qu'il y avait sur le lanceur de balles, m'ont permis de me rendre compte qu'une pièce 3D est bien plus difficile à faire. En effet, la pression des balle en mousse exercé une force sur l'axe de la roue et du moteur, selon les conseils de M. Milharo, professeur référent, les pièces conçues sont assez solides pour tenir la pression de l'envoi des balles. Le rammassage des cubes fût compliqué, il ne fallait pas trop les serrer, mais ne pas avoir de jeu non plus. Avoir une surface de friction assez grande mais à la fois une taille réduite pour qu'il passe dans les dimensions du robot. La descente des balles était aussi un vrai problème, le placement de petits servomoteur, afin de les trier, fût complexe.
Ce que j'en retiens
Ces 7 mois ont été éprouvant et pleins d'apprentissages hors de mon scope d'étude. C'est ainsi que j'ai pû m'ouvrir à d'autres domaines pour mieux comprendre mes propres développement en embarqué. La gestion du stress, des rush, du travail que nous avions, de l'organisation de l'équipe, tout ceci était nouveau mais extrêmement formateur.