
SUMOBOT DokCay
Le SUMOBOT DokCay fait avec Étienne Cayon pour une compétition organisé par ESIE Espace.
La problématique
La compétition consiste à l'affrontement de deux robots dans une arène circulaire, il n'est pas autorisé de détruire le robot adverse mais seulement de le pousser, il doit également être autonome et donc être capable de détecter son adversarie ainsi que le bord de l'arène. Sa masse maximum étant de 500g et ses dimension 500mm*500mm*500m La hauteur maximum n'étant pas imposé.
L'approche
Pour répondre à cette problèmatique nous avons voulu essayer de répondre d'une nouvelle manière, ayant déjà vu dans la compétition des robot à 6 roues, d'autre utilisant un système de pompes pour gagner en adhérence. Nous avons listé les différents moyens et contraintes physiques afin d'optimiser notre efficacité. Nous souhaitions également faire nous même le robot de A à Z utilisant une imprimante 3D que nous avons et faire l'électronique.
La réalisation
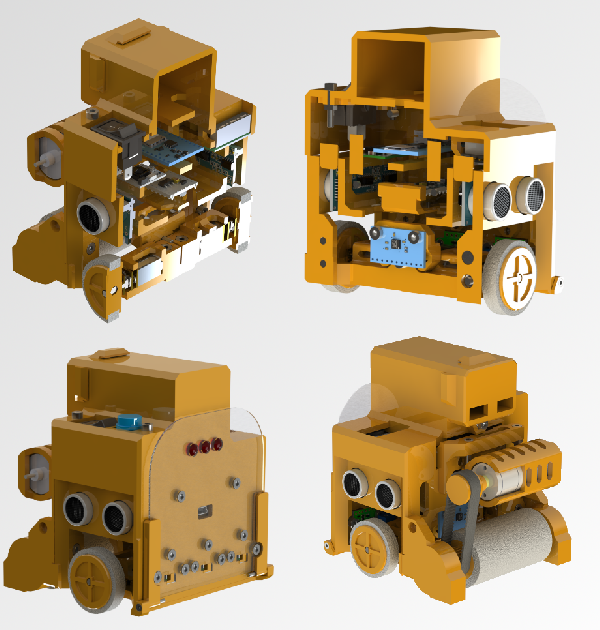
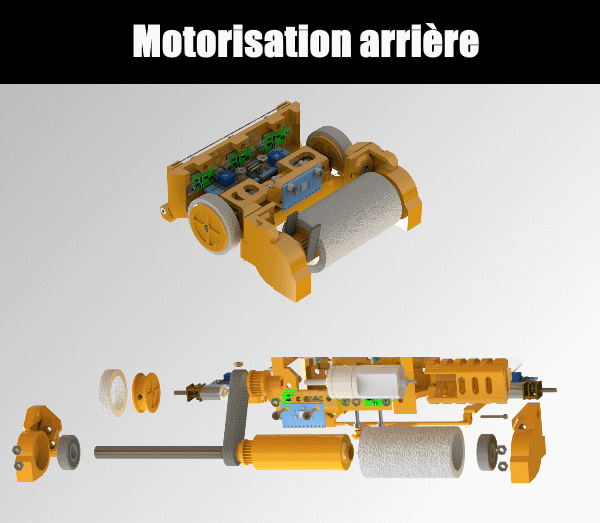
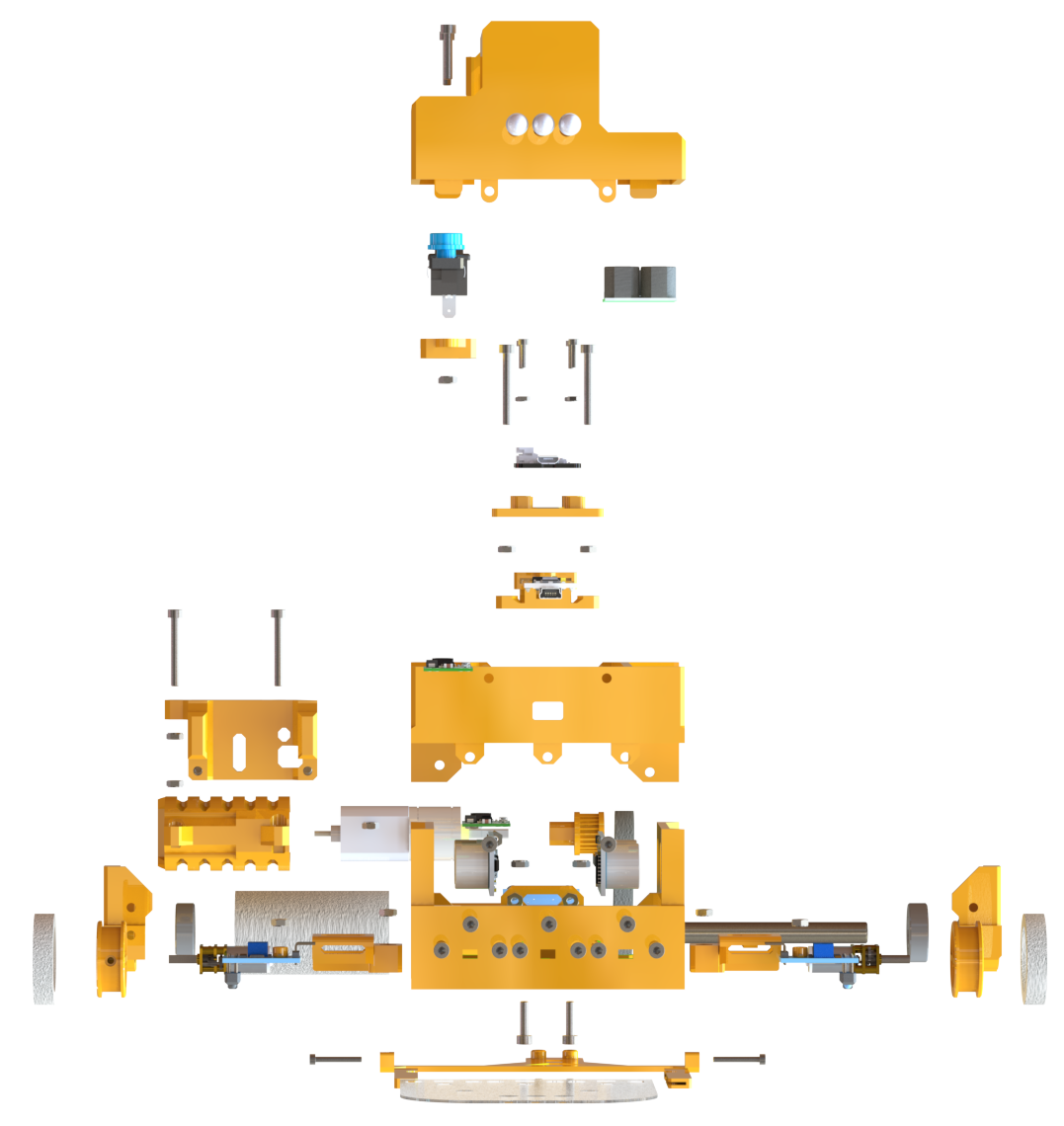
J'ai utilisé SolidWorks afin de réaliser le robot, préférent valider étage par étage, donner un accès pour téléverser le code rapidement utilisant une arduino nano, utiliser de la visserie afin de pouvoir démonter le robot, le rendre modulable, un accès batterie indépendant pour faciliter l'accès et le rechargement un afficher de la tension de la batterie LiPo (obligatoire dans le règlement) visible de l'extérieur, un bouton d'alimentation général, un bouton actionneur pour déclencher la séquence de combat, un buzzer pour un retour d'information (et un peu de fun), 3 leds en façade afin d'avoir un retour de données sur la détection. Au niveau des capteurs, nous souhaitions une vision précise devant nous avec 3 télémètres lasers en parallèle et une vision latéral global avec des capteurs ultrasons donnant une vision en cône bien plus large mais bien moins précise. Pour la propulsion, 2 petits moteurs pour les deux roues de devant afin d'avoir une traction guidée et un gros moteur en courroie à l'arrière au dessus d'une large roue, prenant un moteur coupleux et une roue avec une surface de contact à la table importante. La veille de la compétition, nous avons rajouté une rampe qui se deploie par mouvement, devant le robot, nous permettant de ne pas être poussé en face à face. Les roues ont été faites via un moule que nous avons modélisé, nous avons coulé du joint de salle de bain dedans. Après séchage, nous avions un cylindre que nous avons découpé selon notre besoin pour les roues de devant et celle de l'arrière. Niveau électronique, nous somme partie sur une batterie LiPo 11.1V 850mah, dimensionné pour nos composants, pilotage d'un pont H, et alimentation régulée par abaisseur de tension, nous avons utilisé actuellement toutes les sortie de l'arduino nano, j'ai également intégré au plus bas du robot et au centre un accéléromètre et un gyroscope afin de pouvoir faire un asservissement en déplacement mais nous n'avons eu de temps de l'implémenter . Le tout rentre tout juste, je l'appelle la boite de Pandore. Voici quelque image de vu du robot ainsi que d'une video d'un combat :
Les problèmes rencontrés
Nous avons atteint la masse après assemblage de 498g, la limite étant à 500g. Les télémètres lasers, plus imprécis que prévus, de 2cm à 5cm devant nous les données était erronées, on a décidé que le logiciel embarquéne prned plus en compte ces valeurs et continue d'attaquer, sauf si on le voit sur nos capteurs ultrasons. Une fois à la compétition, nos capteurs de ligne qu'on avions décidé de régler via le potentiomètre, ne détectaient plus le noir de la table, ne ppouvant pas risquer de tout démonter, j'ai réussi à y accéder avec une lame de scalpel en appuyant légerement dessus, ce qui nous a sauvé lors des rencontres.
Ce que j'en retiens
La réalisation de l'architecture mécanique et électronique m'a fait rencontrer des problématiques de l'embarquée avec de l'électronique limité en capacité, ainsi que des contrainte forte en place et en masse m'ont fait réfléchir à des solutions pour répondre, par exemple au placement et au développement de la courroie arrière. Étant en permanente interface avec Étienne pour son côté logiciel, nous devions exprimer chacun nos contraintes, ce qui en résulte d'une bonne communication.