Bienvenue sur le site web de Thibault Doktor
Sur ce site web, vous allez en découvrir bien plus sur qui je suis et quelles sont mes projets.
Qui suis-je ?
Actuellement en recherche d'emploi dans le logiciel embarqué. Je suis toujours à la recherche d'innovation que cela soit dans des projets personnels ou professionnels. Découvrir et développer des méthodes afin d'optimiser mes systèmes embarqués du point de vu logiciel, électronique et mécanique.
Mon parcours
Parcours lié à l'informatique
Stage de fin d'étude | 2019 mars-août | STMicroelectronics
Développement d'un benchmark automatique multiplateformes sur la cryptographie appliquant un développement en C, en Python ainsi que l'utilisation d'outils interne à ST.
Projet de fin d'étude | 2019 septembre-janvier | STMicroelectronics/ENSIM
Développement d'un finger tracking embarqué dans une une plateforme MP1 de STMicroelectronics avant sa sortie (appliquant une NDA), dispositif comprenant une carte MP1, une webcam et un pico projecteur avec Hugo Sergent un camarade de classe.
SumoBot | 2019 - 2023
Participation à la coupe SumoBot organisée par l'association ESIEESPACE. Développement sur des moteurs Brush-Less, détection laser,.
Coupe de France de Robotique | 2017 - 2018
Président de l'association ENSIM'Elec participant à la coupe de France de Robotique, classé 9ème sur 148.
24H du code | 2017, 2018 et 2019
Participation aux 24H du code, gagnant du sujet proposé par l'entreprise STMicroelectronics avec l'équipe Diland.jar en 2018 et avec l'équipe des Gros Morts en 2019.
Membre du HAUM | 2017 - 2018
Membre de l'association HAUM basé au Mans. HackerSpace où j'ai pû développer d'autres compétences que celles acquises à l'école en échangeant avec les membres, j'ai également contribué à la création du sujet des 24H du code 2017 proposé par le HAUM.
Diplômes
Élève ingénieur | 2014 - 2018 | Le Mans
A l'ENSIM (École Nationale Supérieure d'Ingénieurs du Mans), en informatique spécialité ASTRE (Architecture des Systèmes Temps Réel et Embarqués).
Baccalauréat | 2014
Obtention du baccalauréat scientifique spécialité mathématiques, mention assez bien avec 17/20 en mathématiques.
Expérience professionelle
Thalès Aerospace and Communication | Novembre 2024 à aujourd'hui | Rungis
Ingénieur logiciel embarqué en C intervenant sur les correctifs logiciels et la documentation d'équipement d'hélicoptère respectant la DO-178B/C.
Exotrail | Avril 2024 à Octobre 2024 | Massy
Ingénieur logiciel embarqué responsable de l'intégration des divers logiciels d'un projet portant sur de l'integration continue en GitLab avec du C et du Yocto.
Kumulus Water | Octobre 2023 à Avril 2024 | Paris
Ingénieur responsable logiciel embarqué et supervision de l'électronique du développement de la machine Kumulus One, produisant de l'eau à partir de l'humidité de l'air.
Management d'une petite équipe de 2 personnes. Développement en C sur la suite de produit STM32Cube et Touch GFX. Choix et réduction des coûts en électronique.
Départ suite à l'annonce du déménagement des équipes à Marseilles
Safran Electronics & Defense | Juillet 2022 à Septembre 2023 | Massy
Embauché au sein de l'unité logicielle, pour du développement en C respectant la DO-178B/C, mais également du Python , CMake dans une VM linux avec un Docker sur des produits STMicroelectronics s'appuyant sur STM Cube IDE/MX/Monitor/Programmer, suivant de la rédaction et relecture de documentation. Force de proposition d'évolution et d'amélioration.
Viveris | Mission Sodern - ArianeGroup | Octobre 2019 à Juin 2022 | Limeil-Brévannes
Prestataire pour Viveris, en mission pour Sodern, filiale de la société aérospatiale ArianeGroup, dans l'unité logicielle. Je travaillais sur différents sujets impliquant du développement en C respectant la DO-178B/C, de la rédaction de documentation ainsi que la rédaction et le passage de plan de test.
Hopi Hills | Bénévole | 2018 juillet-août | Japon
Lors de ce séjour au Japon, j'ai passé 9 semaines à travailler dans une ferme comprenant beaucoup d'animaux, allant du lapin jusqu'à l'autruche que je devais manipuler. La moitié de l'équipe était anglophone, d'où un gain de compétence en anglais. Le travail des chevaux était mon objectif principal, étant le seul qualifié pour le dressage des montures.
Soutien scolaire en mathématiques | 2015-2018
Cours de mathématiques particuliers à des lycéens et collégiens.
Conseiller en informatique pour une entreprise privée | 2016
Conseil sur divers aspects informatiques. Tel que régler des problèmes de connexion récurrents, ou encore adapter leurs matériels pour le développement souhaité.
L’île aux poneys | Stagiaire | août 2016 (4 semaines) | Île de la Réunion
Stage dans le cadre du stage ouvrier pour valider le diplôme d'ingénieur sur l’île de la Réunion, j’étais palfrenier, je m’occupais de la clientèle et j’ai également été accompagnateur à cheval.
Laboratoire de prothèse dentaire | Plâtrier | 2015 juin-août | Basse-Normandie
Préparation d’empreintes dentaires pour le futur travail fait par le prothésiste dentaire. J'ai travaillé avec différents types de plâtre et de cire, respectant différents protocoles en mettant donc un pied dans le monde du travail pour la première fois.
Mes compétences
Informatique
Languages pratiqués
C, C++, Python, assembleur, SQL
Outils utilisés
Visual studio code, CI, Docker, VM Linux, GitLab, GitHub, STM32 Cube IDE/Programmer/Monitor/MX
Autres compétences :
Développement 3D
Solidworks, Cura
Compétences graphiques
Sony Vegas Pro 18, Gimp, Krita
Divers
Sportives/personnelles
20 ans d'équitation (Galop 7), CSO, dressage, cross, spectacle équestre, organisation de randonnées ... 8 ans de moto en loisirs 10 ans de bricolage diversifié (meuble, électronique, ...) 10 ans de création de costumes mêlant mécanique et électronique
Permis
Permis A Permis B
Langagières
Anglais, TOEIC 815, expression courante lu, écrit, parlé Allemand B1, bonne base de la langue en lu, écrit, parlé
Mes projets terminés
Coupe de France de Robotique | 2018
La coupe de France de robotique est organisée par l'association Planète Science chaque année, c'est un concours de robotique annuel. Un règlement est donné fin septembre pour une participation fin mai de l'année qui suit. Deux équipes s'affrontent sur une table pour marquer un maximum de points en effectuant des actions en déclenchant un ou deux robots autonomes lors d'un match de 100 secondes, les robots ne doivent pas rentrer en contact direct sous peine de sanction. L'année à laquelle j'ai participé, nous étions une équipe de 7 élèves totalement novice à la robotique faisant partie de l'association ENSIM'Elec, durant cette année scolaire, j'ai été le président de l'association. À la découverte de la gestion administrative d'une association et à la fois de la robotique, mon équipe et moi-même nous sommes organisés dans une gestion de projet avec la méthode AGILE; ce qui implique de ne pas avoir de chef de projet. Ce qui fût une nouvelle approche bien différente des autres projets auxquelles j'ai participé.

Pendant cette année, comme nous étions une équipe réduite, nous nous sommes tous donnés un secteur de développement afin que chacun se spécialise pour développer plus rapidemment. Pour ma part, j'ai fait énormement de développement sur les actionneurs du robot en modélisant des modèles 3D du lanceur de balles et celle de pinces montées sur crémaillères dans un espace réduit, ainsi que diverses supports de capteurs ou autres, je souhaitais également que le lanceur de balle soit asservi en vitesse afin d'envoyer les balles à la distance souhaitée selon une consigne. Voici un gif de l'envoi des balles via le lanceur que mon équipe et moi-même avons développé.
SUMOBOT | 2018 - 2019
J'ai participé, cette année avec Anthony Delétang, à la compétition venant du Japon, SUMOBOT, organisé en France à plus petit échelle par l’association ESSIEESPACE, basée à Paris. Elle consiste à mettre en affrontement deux robots qui doivent pouvoir se pousser en dehors de l’arène de façon totalement autonome.

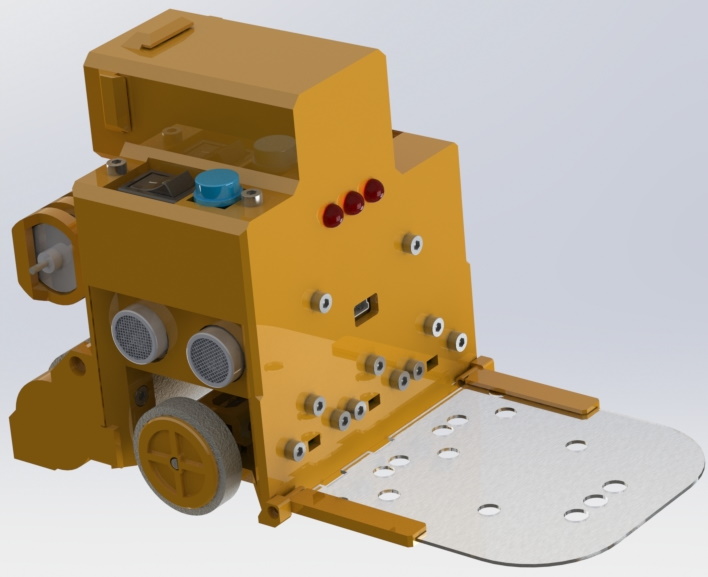
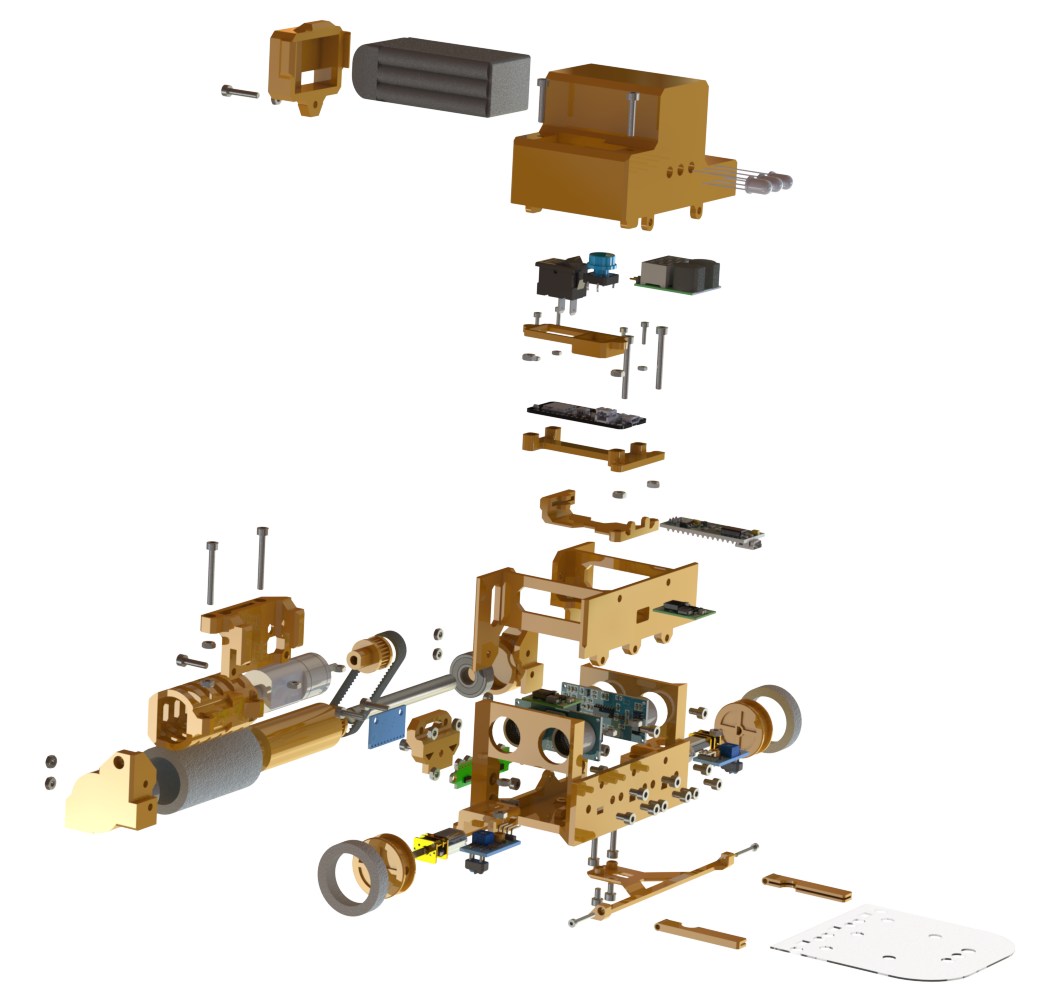
SUMOBOT | 2020
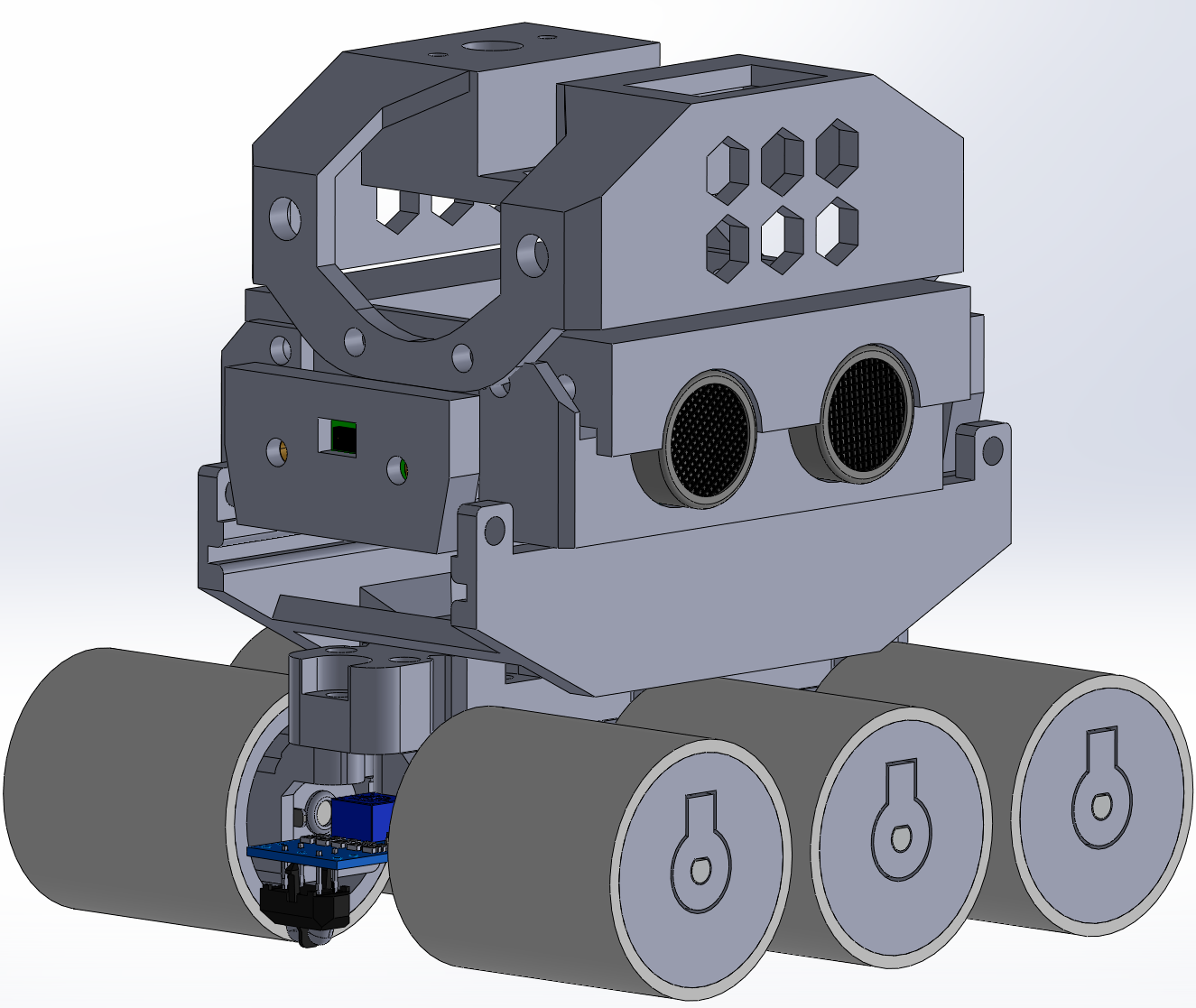
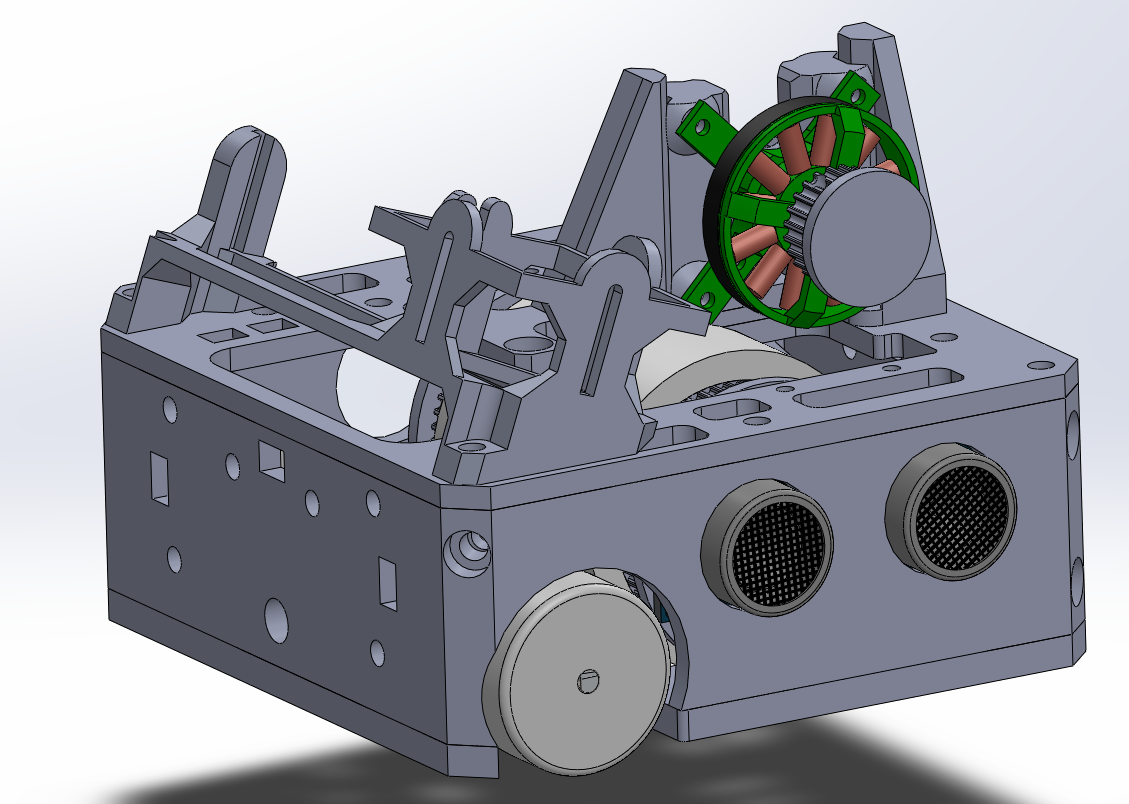
En 2020, étant en colocation avec Etienne Cayon, ingénieur en système embarqué, nous avons participé à la compétition SUMOBOT en souhaitant faire un robot plus dans son intelligence de perception de l'adversaire que dans sa vitesse, le robot, nommé DokCay, est équipé de 3 télémètres laser en I2C en façade, 2 capteurs ultrason et 2 capteurs suiveur de ligne. Dans ce projet je me suis chargé de l'électronique et de la mécanique en essayant de nouvelles choses que je n'avais jamais fait.
SUMOBOT | 2023
Pour cette année, j'ai voulu essayé pas mal de type de robot. Le premier, pour pouvoir affronter les autres, servant de test. Doté d'un capteur ultrason de chaque côté lui donnant une vision conique à l'avant et à l'arrière, d'une led, d'un bouton ON/OFF, d'une batterie 9V, d'une Arduino nano Atmega328P, d'un capteur infrarouge suiveur de ligne, de deux roue avec mini moteur à courant continue.

Stabilisateur avec un processeur ARM - STM32F4 | 2018
Lors d'un TP encadré par monsieur Kosaï Raoof à l'ENSIM, nous devions par binôme faire un projet utilisant un processeur ARM, j'étais en groupe avec Etienne Cayon. Nous avons utilisé une carte de chez STMicroelectronics, nommé NUCLEO FR030R8 pour faire un stabilisateur basé sur un gyroscope et un accéléromètre 3 axes chacun, un MPU 6050 et 2 servomoteurs MG90S. Le tout permettait de maintenir une petite planche de bois à l'horizontale. Comme le gif suivant le montre :Robot arduino détection de bougie
Lors d'un TP sur l'asservissement en trinôme, avec Roger Guy Folly et encore une fois avec Etienne Cayon, monsieur Taoufik M'Hammedi, notre professeur, nous a proposé de développer un robot capable de détecter une flamme, comme celle sur une bougie. Sachant qu'il nous fournissait une base roulante vendue par Arduino. Pour détecter cette flamme, nous nous sommes tournés vers deux capteurs infrarouges, et par la suite nous avons décidé de pouvoir éteindre la flamme avec un ventilateur que nous avons récupéré dans un ancien ordinateur. Les deux capteurs permettaient de savoir si la flamme se situait plus ou moins d'un coté. Le robot tourne sur lui-même jusqu'à que les capteurs infrarouges retournent une valeur supérieure à un seuil que nous avions fixé. Une fois ce seuil dépassé, le robot avance lorsque les deux capteurs indiquent quasiment la même valeur, avec un seuil d'erreur adapté aux capteurs. Une fois le robot devant la bougie, le ventilateur éteint la flamme et le robot retourne sur lui-même à la recherche d'une nouvelle flamme. La vidéo suivante vous présente le robot pompier, comme nous l'avons sobrement nommé, en pleine utilisation.
Robot Aspicot de STMicroelectronics des 24H du code édition 2018
Lors de l'édition 2018 des 24H du code, 4 sujets nous étaient proposés, nous avons choisi, mon équipe et moi-même, le sujet proposé par STMicroelectronics. L'équipe Diland.jar était composée de Etienne Cayon, Hugo Sergent, Quentin Debroise et de moi-même. Sachant que cette participation était obligatoire et notre travail était noté. Quentin étant de l'ENSICaen, il ne pouvait pas coder mais seulement coacher. Une gestion du git, ainsi qu'une bonne gestion du projet nous as permi d'aller le plus loins dans la réponse du sujet, nous permettant d'accéder à la première place. Nous devions répondre à des énigmes lues automatique par un petit robot fournis, ces énigmes étaient lu par un lecteur de puces NFC sous une feuille servant de parcourt, de là, le robot répondait à l'énigme en communiquant au serveur fournit la réponse, validant des points ou non. Nous avons joué de plusieurs astuces pour répondre à un maximum d'énigmes.
Costume de Pyramid Head, tiré de l'univers Silent Hill

L'idée m'est venue pour un concours de costume pour une soirée Halloween en 2014. Le casque étant le challenge numéro 1, à l'époque j'avais peu de connaissance en électronique, j'avais récupéré une guirlande de noël qui ne fonctionnait plus, et je prenais les leds pour faire un éclairage rouge à l'intérieur et je l'alimentais avec des piles basiquement. Aujourd'hui je l'améliore encore mais des versions biens plus viables sont apparus en concours et en convention, le tout n'est fait que de récupération, les échasses ne sont que des crocs sanglées sur des seaux, renforcé avec des tasseaux de bois. Le casque est fait d'une armature en tuyaux PVC, type IRL, et assemblé au pistolet à colle avec des plaques de carton. Pour renforcer le tout, j'ai utilisé du papier journal collé avec de le farine mélangée à de l'eau chaude. Un casque de chantier ainsi que des leds sont ajoutées à l'intérieur pour un meilleur maintien et des yeux rouges visible de l'extérieur. Pour l'épée, elle est seulement faite de carton et tasseaux de bois. Prochainement, je referai le costume pour améliorer certains points et y ajouter la machine à fumée et plusieurs éléments électroniques.
Costume Seigneur Sith, tiré de l'univers de Star Wars

Un costume totalement inventé, modélisation et adaptation de l'électronique dans des manches modélisés et imprimés en 3D, élément electroniques sur les bras alimentés. Un casque fait sur mesure, équipé de bandeaux de leds adressables, d'une arduino nano, une batterie 9V et d'un MPU6050, un gyroscope accélerometre, me permettant de changer de mode par un simple mouvement de tête. Le développement est accessible sur mon GitLab.
L'électronique associé est dans le casque et ressemble à ceci :
Création de A à Z de chevalières


J'ai la chance d'avoir mon père dans le domaine de la prothèse dentaire, ce qui me donne accès à des machines afin de pouvoir couler des métaux selon des moules, après avoir été plâtrier, j'ai pu comprendre les étapes de production et j'ai souhaité me l'approprier en faisant ma première chevalière en cire rose, utilisé en prothèse dentaire. N'ayant pas non plus une grande expérience en sculture sur cire de petite taille le résultat fût très grossier. Ayant plus de compétences en modélisation 3D, j'ai fait moi-même un modèle et je l'ai imprimé avec une buse de 0.2mm. Le résultat n'était pas parfait mais suffisant pour retoucher avec la cire. Après cela j'ai pratiqué les mêmes étapes utilisées en prothèse dentaire pour produire ma chevalière plus légère, plus design mais encore avec des défauts notable qui s'éffaceront en prenant de l'experience.
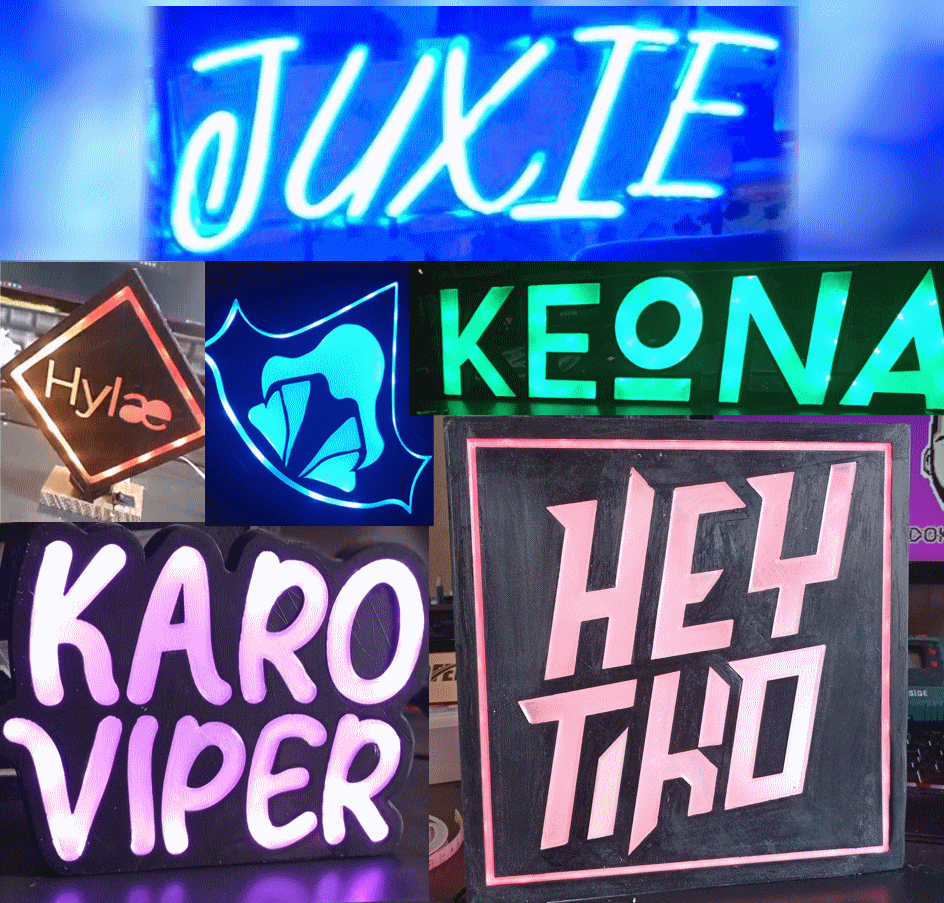
Modélisation et impression 3D
Production de logo en leds pour des amis, produits sur mesure, voici quelques exemples :
X-wing échelle 1/5
 En tant que responsable décoration du GALA 2018 de l'ENSIM, nous avions pris pour thème la science fiction. Nous avons donc décidé de
faire de la décoration telle qu'une porte StarGate réduite pour l'entrée ou comme je le présente ici, une version réduite d'un X-wing
de plus de 2 mètres de longs. Je l'ai réalisé avec un camarade de l'école à partir de papier journal, carton de récupération, tasseaux de bois, tubes PVC IRL
et de cylindre de paquets de chips. Lors de la soirée, j'ai ajouté des leds rouges portables aux bouts des blasters.
Le challenge était de pouvoir facilement le transporter, nous avons donc réalisé le corps, les ailes, les blasters de façon indépendantes, afin de pouvoir le transporter
dans une modeste Clio 2.
En tant que responsable décoration du GALA 2018 de l'ENSIM, nous avions pris pour thème la science fiction. Nous avons donc décidé de
faire de la décoration telle qu'une porte StarGate réduite pour l'entrée ou comme je le présente ici, une version réduite d'un X-wing
de plus de 2 mètres de longs. Je l'ai réalisé avec un camarade de l'école à partir de papier journal, carton de récupération, tasseaux de bois, tubes PVC IRL
et de cylindre de paquets de chips. Lors de la soirée, j'ai ajouté des leds rouges portables aux bouts des blasters.
Le challenge était de pouvoir facilement le transporter, nous avons donc réalisé le corps, les ailes, les blasters de façon indépendantes, afin de pouvoir le transporter
dans une modeste Clio 2.
Mes projets en cours
Machine à fumée portable | 2018 - 2019
J’ai souhaité créer une machine à fumée portable pour mes différentes création de costumes. Ainsi je ne serais plus dépendant d’une alimentation secteur utilisé pour une machine à fumée conventionnel.
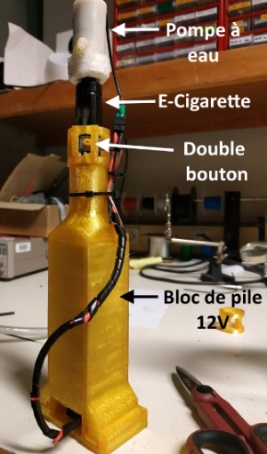 Pour la créer, j’ai commencé par la recherche de l’existant, plusieurs moyens de générer de la fumée. Mais pour une durée assez longue d’utilisation, j’ai choisi l’exploitation d’une
cigarette électronique avec une pompe à eau pour le moment en adaptant le tout avec des pièces 3D adapté pour assembler le tout.
Actuellement, le développement reste général et fonctionnel, mais il y a encore une marge d’optimisation. Et le système doit être adapté au milieu où il est utilisé afin d’avoir
une optimisation d’encombrement.
Le tout doit pouvoir s'adapter à toute situation et être déclenché aisément, soit par l'actionneur que j'ai mis en place, ou plus tard par un déclencheur distant piloté par un
microcontrôleur qui déclenchera la production de la fumée via un smaptphone ou une télécommande, type infrarouge.
Pour la créer, j’ai commencé par la recherche de l’existant, plusieurs moyens de générer de la fumée. Mais pour une durée assez longue d’utilisation, j’ai choisi l’exploitation d’une
cigarette électronique avec une pompe à eau pour le moment en adaptant le tout avec des pièces 3D adapté pour assembler le tout.
Actuellement, le développement reste général et fonctionnel, mais il y a encore une marge d’optimisation. Et le système doit être adapté au milieu où il est utilisé afin d’avoir
une optimisation d’encombrement.
Le tout doit pouvoir s'adapter à toute situation et être déclenché aisément, soit par l'actionneur que j'ai mis en place, ou plus tard par un déclencheur distant piloté par un
microcontrôleur qui déclenchera la production de la fumée via un smaptphone ou une télécommande, type infrarouge.
J’utilise une pompe à eau premier prix qui doit être alimenté en 5V, mais que j’alimente en 12V sur moins de 5 secondes. Après discussion avec la personne qui m’a vendu la cigarette électronique premier prix, j’ai su que je ne pouvais l’activer plus de 5 secondes, dans le cas contraire, je risquais de d'endommager la résistance. J’utilise des piles AA (1.5V l'unité) mais j’ai également testé avec une batterie LiPo 12V qui donné un gain de place non négligeable.
Adaptation de la machine à fumée sur un costume
Pour le cosplay d’une amie, j’ai adapté le système à mettre dans un tube en PVC afin de faire sortir de la fumée dans une boule en plastique avec l’activation d’une led pour donner un effet plus science fiction à la boule qui est censé être « magique ». Cette même boule a été percée pour avoir un filé de fumée qui en sort. Je détaillerais par la suite, en m'appuyant sur des photos pour vous montrer l'avancée du projet.
Costume de Big Daddy, tiré de l'univers de Bioshock

En cours de réalisation, j’ai quasi créé l’entièreté du personnage avec un drill fonctionnelle et une main articulé, mais il faut que je revois plusieurs partie pour que cela dure dans le temps, le cosplay est assez encombrant et je réfléchis à une autre méthode pour pouvoir le transporter. Pour le moment j’ai découpé la sphère de devant pour qu’il puisse rentrer dans ma voiture, je dois donc trouver un moyen de la fixer facilement, comme avec un système de scratch ou encore d’emboitement entre tuyau PVC IRL.
 Pour l’utilisation de la main gauche, j’ai souhaité qu’elle paraisse énorme et pour respecter les dimensions, j’ai tenté de la faire articulé avec des ficelles et d’autres
bricoles.
Pour la drill, je me suis arrangé pour la faire en carton et papier journal uniquement, j’ai par la suite ajouté une tige filetée en son centre que je peux serrer dans le mandrin
de visseuse pour le faire tourner, j’ai fait un boite adapté à ma visseuse pour le caché dans une sorte boitier.
Pour l’utilisation de la main gauche, j’ai souhaité qu’elle paraisse énorme et pour respecter les dimensions, j’ai tenté de la faire articulé avec des ficelles et d’autres
bricoles.
Pour la drill, je me suis arrangé pour la faire en carton et papier journal uniquement, j’ai par la suite ajouté une tige filetée en son centre que je peux serrer dans le mandrin
de visseuse pour le faire tourner, j’ai fait un boite adapté à ma visseuse pour le caché dans une sorte boitier.
Casque type DaftPunk en style retro
L'idée était de réaliser un casque autonome capable d'être alimenté avec une PowerBank ou avec un petite batterie, allumant des matrices de LED pouvant afficher des expressions et du texte. Le projet est bien avancé, mais le code doit être optimisé, pofiné afin d'obtenir une simplicité de modularité des affichages.
 Les potentiomètres du dessous de l'écran, servant à la base à changer les contrastes, la luminosité de l'écran, etc ... , seront
bientôt reliés au microncontrôleur afin de changer le texte juste en les tournant.
Les potentiomètres du dessous de l'écran, servant à la base à changer les contrastes, la luminosité de l'écran, etc ... , seront
bientôt reliés au microncontrôleur afin de changer le texte juste en les tournant.
Je souhaiterai par la suite ajouter un microphone relié au microcontrôleur ainsi que d'autres matrices de LED afin de faire une bouche s'animant
au son de ma voix. Et peut-être un gyroscope/accéléromètre du type MPU6050, pour adapter des émotions selon les gestes de la tête.